汽车跳槽机器人行业是降维打击,机器人硬件系统之MCU分析(下)
- 2026-03-27 01:43:00

人形机器人通常需要三大类型的MCU,一是DCU内的MCU,主要做标准以太网、CANFD、EtherCAT工业以太网、RS485、PROFIBOS等网络协议转换,同时提供一定的安全保障和OTA,近似于汽车网关,另一类是电机驱动型MCU,最后是灵巧手电机MCU。如果只有一种网络协议如EtherCAT,DCU自然是不需要的。灵巧手对体积要求极高,空心杯电机与关节的伺服电机也有所差别,所以单独分出一类。
基本上每个自由度需要一个MCU,每个人形机器人需要使用约30-45个MCU,但人形机器人出货量极低,国外没有任何一个厂家专门为机器人领域开发专用MCU,都是工控领域通用MCU。但国内不同,不少厂家都推出了机器人专用MCU,甚至是灵巧手专用MCU。
实例:兆易创新的GD32H75E MCU
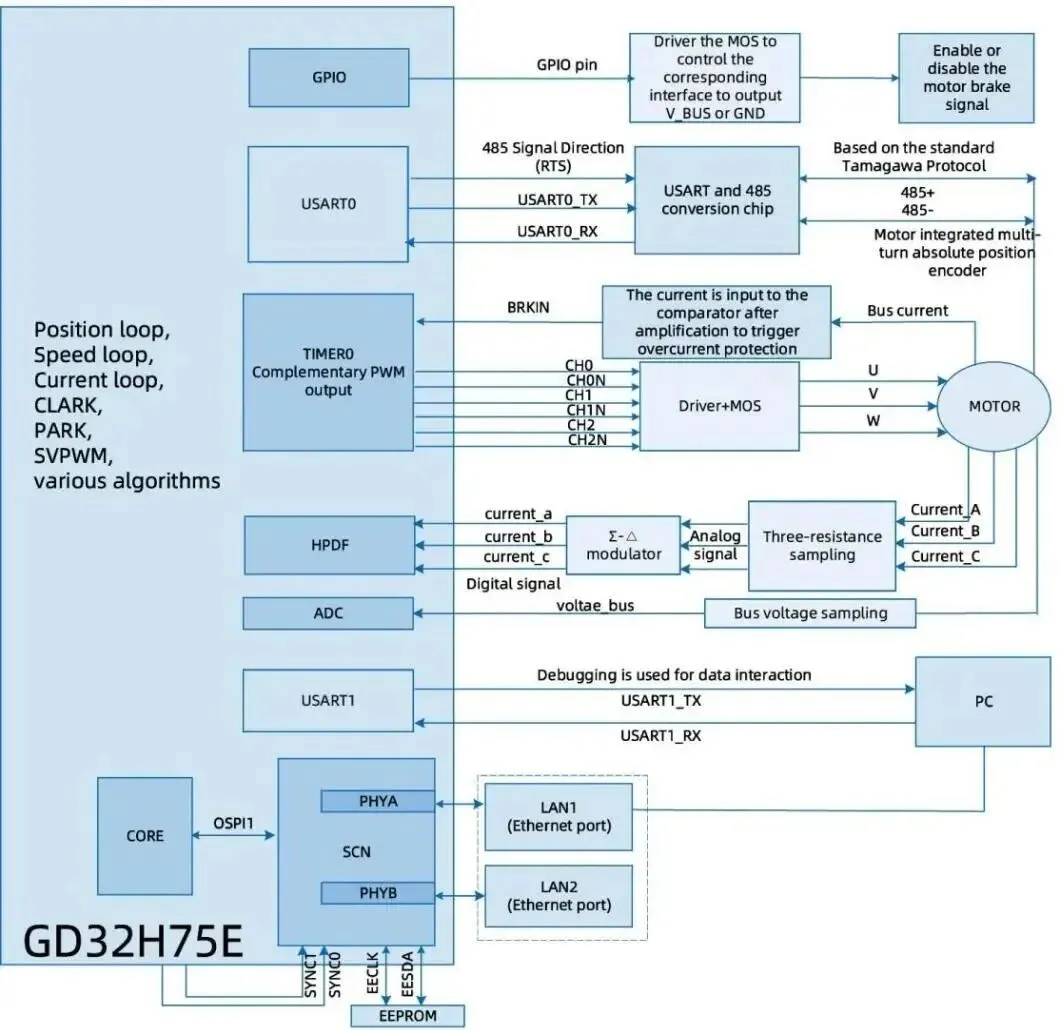
图片来源:兆易创新
PC通过以太网口与EtherCAT物理层连接,这个物理层可以是单独的芯片,也可以集成在MCU内部,MCU再控制执行器即电机系统,典型实例如上图的兆易创新的GD32H75E MCU。这款MCU最大特色是内置EtherCAT Slave Controller (ESC)和两个EtherCAT物理层,单独分离出来的ESC(从站控制)需要外挂EEPROM,还需要与MCU进行实时数据交互,传统的MCU算力和内存都有较大限制,可能需要外扩内存,并通过FPGA实现运动控制算法和处理编码器反馈。如果还要实现一定的信息安全或功能安全目标,则额外的安全单元也必不可少。而兆易创新选择性地将最值得集成的ESC,高算力MCU,大内存等高价值器件集成在了一起,不仅减少了40%~60%的板级系统成本,大幅缩减了系统总延时,PCB尺寸和系统总功耗也进一步降低。ESC实时性高,所以消耗运算资源比较多,通常需要一个ARM的Cortex 的M4核心。
除了兆易创新,先楫半导体也有类似的设计,先楫HPM6E00系列是中国首款拥有德国倍福公司(Beckhoff)正式授权 EtherCAT从站控制器(ESC: EtherCAT Slave Controller)的高性能MCU产品。该系列产品具备高性能运动控制、高实时工业以太网互联的特性,提供RISC-V双核,多达3端口的千兆以太网交换机,支持多种工业以太网协议和时间敏感网络 (TSN: Time-Sensitive Networking),支持32 路高分辨率 PWM 输出、16位ADC、Σ∆数字滤波。
HPM6E00网络非常强大,支持TSN交换机,具备3个外部端口和1个内部端口。配备EtherCAT Slave控制器,带有3个MAC端口。内置1个千兆以太网MAC控制器。8个CAN-FD接口、4个16位SAR ADC以及2个4通道滤波器。
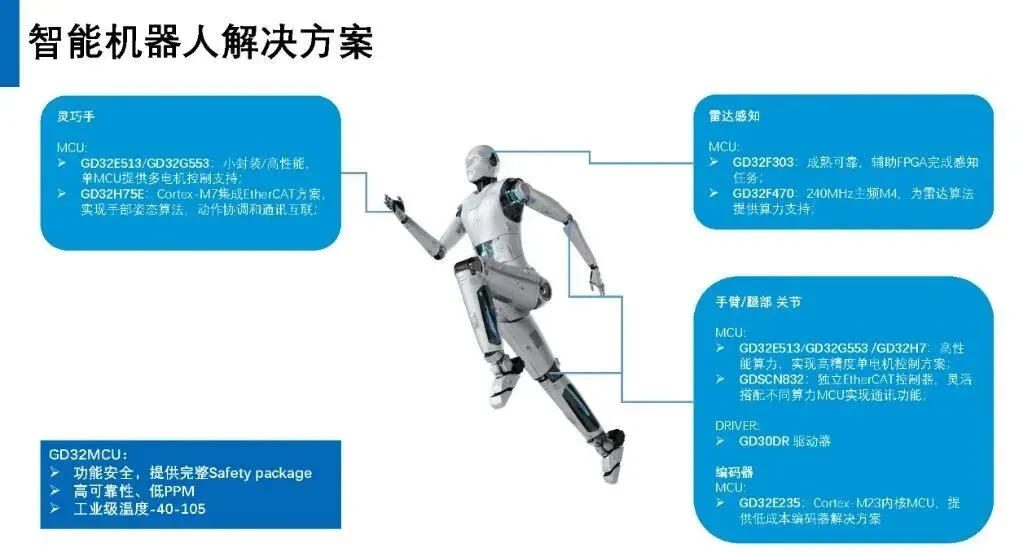
图片来源:兆易创新
兆易创新的机器人用MCU分布,不同关节、灵巧手需要不同的MCU控制。对于机器人电机控制,最合适的算法就是FOC,这也是新能源汽车驱动电机的先进算法。
常见的机器人电机控制MCU一览
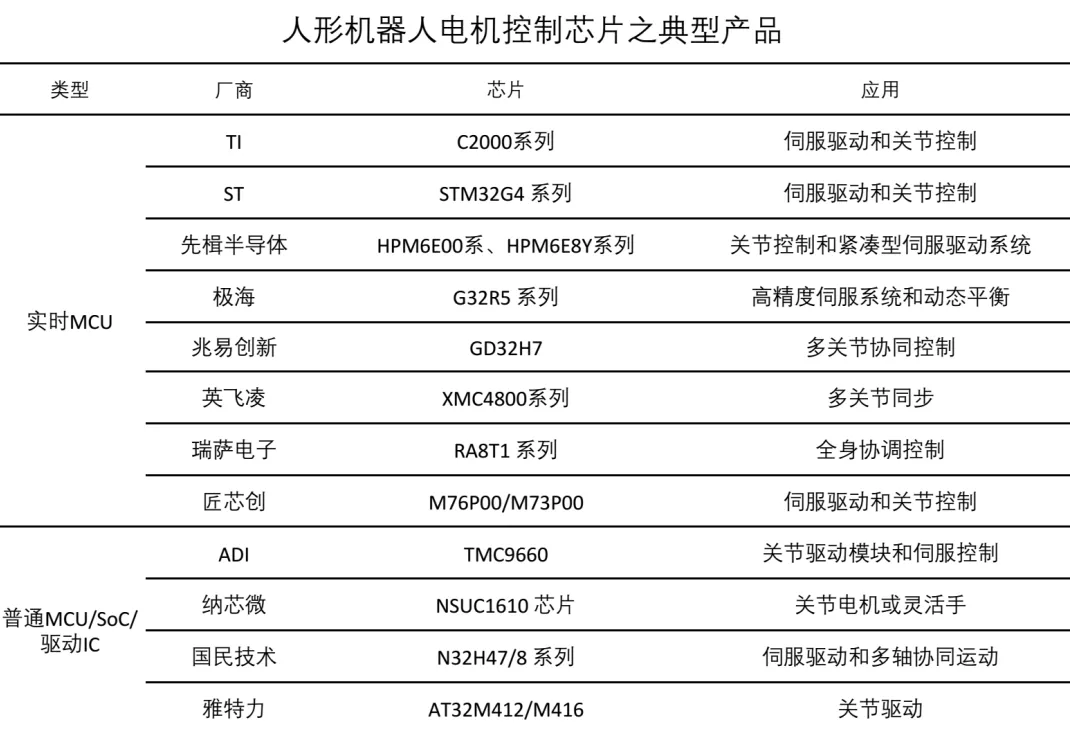
来源:网络
基本上每个自由度需要对应一个电机控制MCU,高端机器人有近50个自由度。
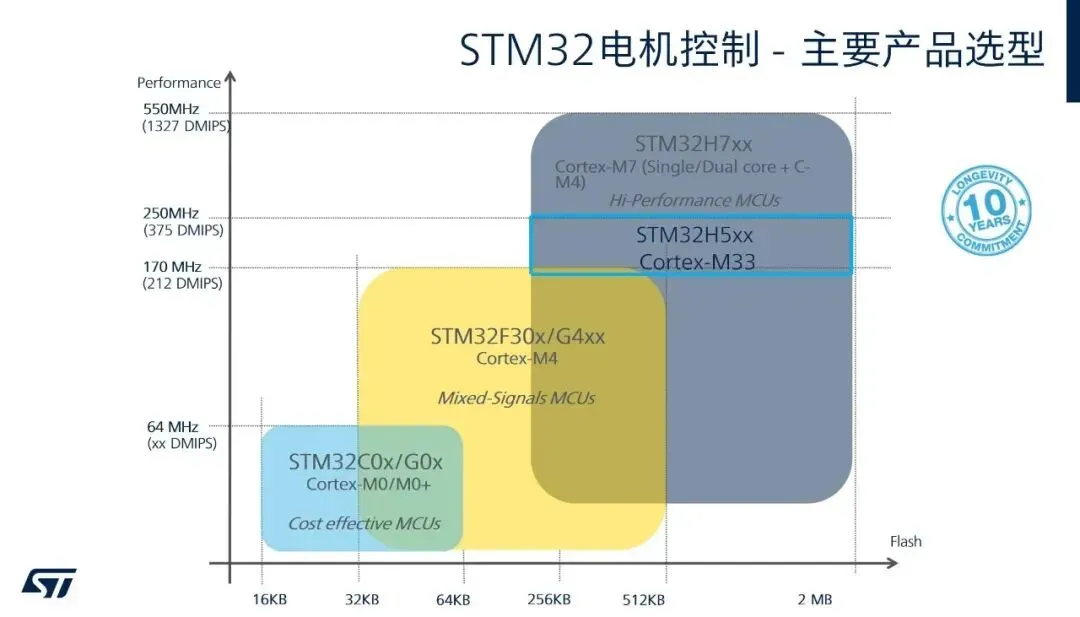
图片来源:意法半导体
目前,机器人领域最常见的还是意法半导体的STM32系列,主要是STM32H7和STM32G4。波士顿动力、高通和宇树都采用STM32H7做MCU控制。
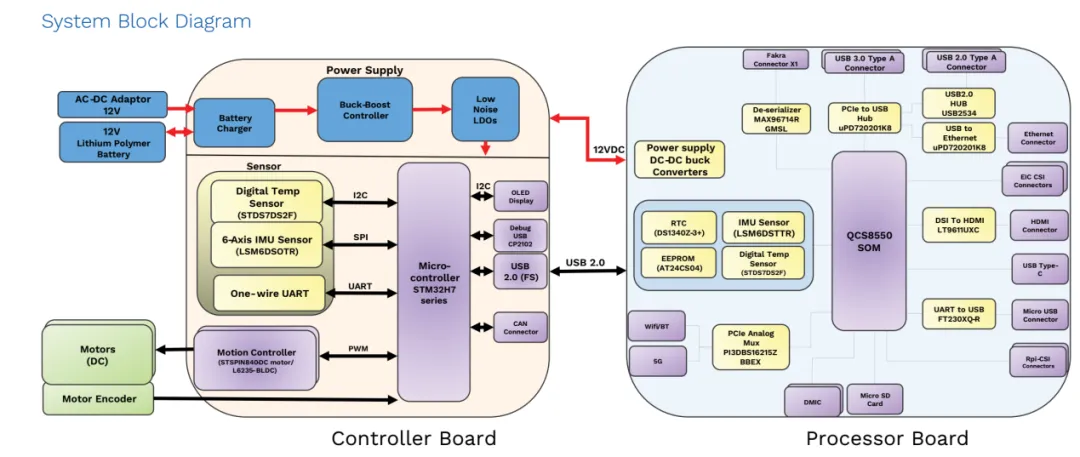
图片来源:高通
高通自主移动机器人即AMR参考设计方案如上图,主芯片是QCS8550和意法半导体的STM32H7。
XMC4800框架图
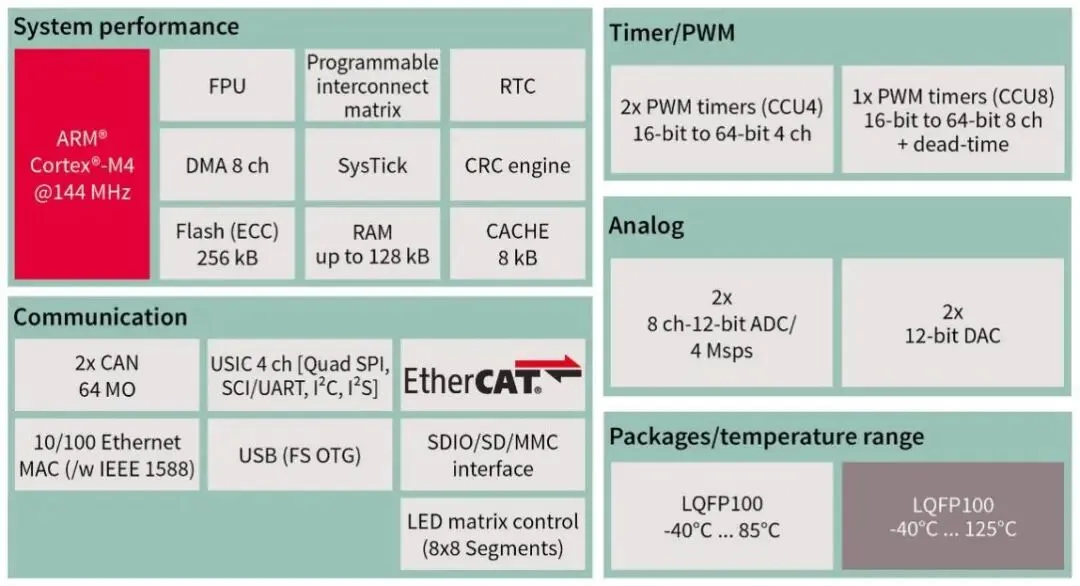
图片来源:英飞凌
除了意法半导体,英飞凌的XMC4800也使用广泛,这是一个2015年推出的芯片,但是对FOC支持度颇高,可谓非常超前,同时也内置了EtherCAT从控制器即ESC。
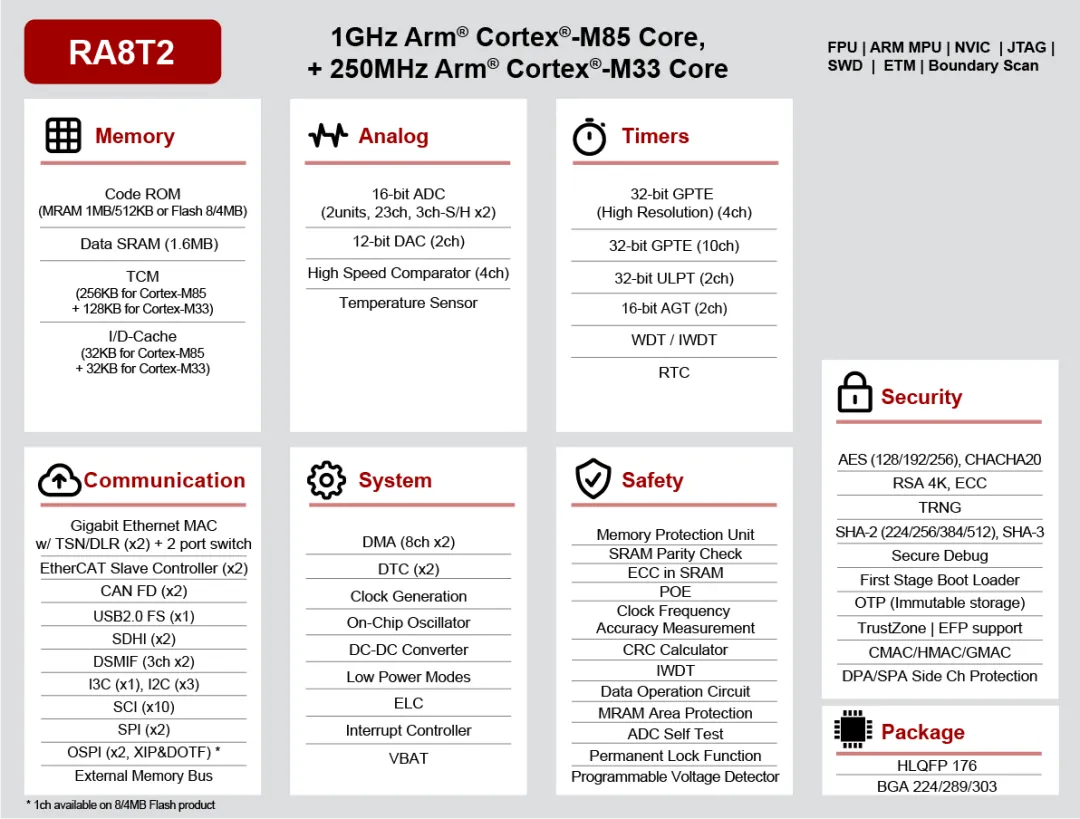
图片来源:瑞萨
最新的则有瑞萨的RA8T2,2025年9月推出。RA8T2算力超高,是目前所有工业控制与机器人用MCU中最高的,没有之一。RA8T2 MCU充分利用Arm® Cortex®-M85处理器的高性能以及Arm的Helium™技术,为数字信号处理器(DSP)和机器学习(ML)的实现带来显著性能提升。这一增强性能支持AI功能用于预测电机的维护需求,有助于减少高昂的停机成本。
除卓越的处理能力外,RA8T2 MCU还通过多种通信接口提供高速多协议工业网络支持,包括两个带DMA的千兆以太网MAC、一个双端口EtherCAT从站接口,以及其它丰富接口。RA8T2配备高达1MB的高速MRAM(磁阻随机存取存储器),访问速度可达100MHz。相较于闪存,MRAM具备更快的写入速度、更高的耐用性和更强的数据保持能力。
此外,RA8T2还集成紧耦合存储器(TCM)——Cortex®-M85的TCM容量为256KB;Cortex®-M33版本的容量为128KB。TCM技术可为用户提供低抖动的高精度实时性能,即使于存在大量中断和分支的电机控制处理中仍可保持稳定运行。
国内五家机器人专用电机控制MCU对比
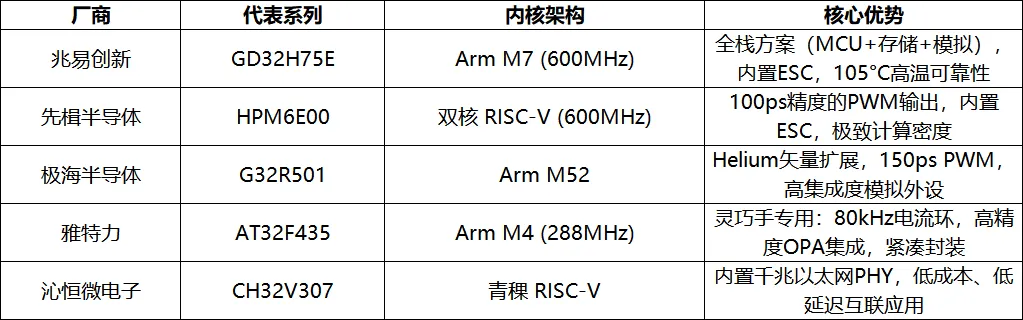
来源:网络
机器人专用电机MCU有两个明显特点,一是需要支持ESC,另一个是需要支持FOC,最好还是无位置传感器FOC。实际上汽车领域的MCU同样适用,且汽车领域MCU一般都达到ASIL-D级安全标准。
机器人领域的电机基本都是BLDC,即直流无刷电机,传统的控制策略是梯形六步换向控制,先进的算法则是FOC。
四种BLDC控制器策略对比
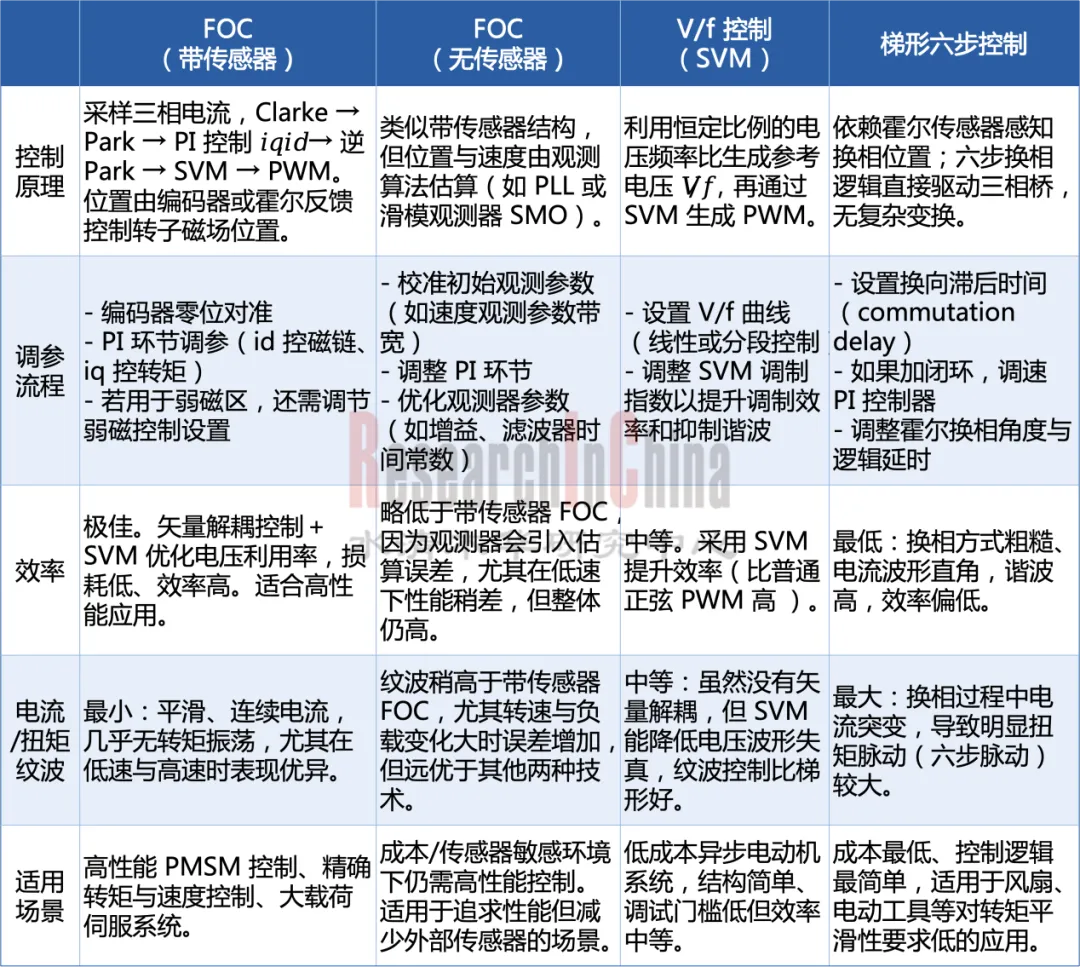
来源:网络
FOC对MCU算力需求较高,FOC与非线性误差补偿电流环的更新频率通常需达到20kHz至100kHz,以确保运动的“透明度”。这意味着MCU必须在5至50微秒内完成一次包含克拉克/帕克变换的完整计算。无传感器FOC算法需要用神经网络来虚拟一个位置传感器,这一般需要一个并行计算单元,如英飞凌最新的TC4X系列MCU内置PPU就是如此,基于神经网络的位置观测器(NN-based position observer),在并行处理单元(PPU)上执行,PPU 与 TriCore 之间通过处理器间通信(IPC)进行数据传输。最终可达200KHz的无位置传感器FOC。
除了FOC外,还有非线性补偿,具身机器人普遍采用谐波减速器,其柔轮变形虽消除了反向间隙,却引入了周期性传动误差(Kinematic Error)。通过实时非线性补偿算法来抵消减速器的运动学波动。为了实现“运动透明度”,关节控制器必须实时解算基于拉格朗日公式建立的动力学方程。需要增加一个浮点运算加速器 非线性补偿: MCU需将减速器的传动误差作为前馈分量注入电流环,这对硬件加速器提出了较高要求。德州仪器的C2000系列能比较好满足,它有硬件加速阵列:专用TMU(三角数学单元)可将Park变换周期缩短1.3倍以上,而独立于CPU运行的控制律加速器(CLA)则确保了电流环解算与通信逻辑的物理隔离,避免了运动中的“抖动”现象。
协议标准: EtherCAT凭借其分布式时钟(DC)实现的微秒级同步(<1μs),已成为具身机器人的事实标准。双核异构逻辑: 领先方案采用双核架构(如Cortex-M7 + M4 或双核RISC-V),其中一个核心专注于EtherCAT协议栈处理,另一个核心专注于FOC算法逻辑。这种物理层面的任务隔离,从根本上消除了通信负荷波动导致的“运动抖动”。 “芯片级集成”ESC不仅是节省PCB面积的问题,它大幅提升了系统的确定性。对于人形机器人在非结构化环境中的稳定行走,这种微秒级的轴间同步是保证整机质心不发生失稳的技术底座。
极海G32R501等产品搭载的Cortex-M52内核引入了Helium(矢量扩展指令集),Arm Helium 技术是 Arm Cortex-M 处理器系列的 M 系列向量扩展(MVE)。Helium 是 Armv8.1-M 架构的扩展,可为机器学习(ML)和数字信号处理(DSP)应用带来显著的性能提升。Helium和Cortex-A系列的Neon深度学习加速同样都是128-bit矢量size的SIMD架构,用浮点单元的寄存器作为矢量寄存器,另外Helium和Neon都有对应的一些矢量处理指令。Helium还支持诸如循环预测、通路预测(lane predication)、复杂数学和scatter-gather内存访问。雅特力的成功案例证明了细分市场的价值:在空间极度受限的“灵巧手”中,通过集成高性能OPA和高速ADC来缩减PCB体积,配合高频电流环。
实际上,汽车领域的高级MCU如英飞凌TC397或瑞萨的U2A16同样适用,汽车领域MCU算力更强,且一般都达到ASIL-D级安全标准,安全性远高于通用工控MCU,唯一缺点就是价格太高。
汽车行业竞争激烈,内卷非常严重,而新兴的机器人行业,前景广阔,难度远低于汽车行业,门槛也是远低于汽车行业,汽车行业跳槽机器人行业妥妥的降维打击,未来会有越来越多的汽车行业人才跳槽机器人行业。
免责说明:本文观点和数据仅供参考,和实际情况可能存在偏差。本文不构成投资建议,文中所有观点、数据仅代表笔者立场,不具有任何指导、投资和决策意见。
更多报告
| AI机器人 | ||
AI机器人 | ||
| 云端和AI | ||
| 车云 | ||
| 动力层 | ||
| 动力 | 混合动力报告 | |
| 800-1000V高压平台 | 电驱动与动力域研究 | |
热管理 | ||
其他 |
| 电子电气架构层 | ||
| E/E架构框架 | E/E架构 | 汽车电子代工 |
| 48V低压供电网络 | ||
| 智驾域 | 自动驾驶SoC | |
| 座舱域 | 座舱域控 | |
| 车控域 | 车身(区)域控研究 | |
| 通信/网络域 | ||
| 跨域融合 | ||
| 其他芯片 | ||
| 车载存储芯片 |
| 智舱系统集成和应用层 | ||
智能座舱应用框架 | 座舱设计趋势 | |
自动驾驶算法和系统 |
| OS和支撑层 | ||
| SDV框架 | SDV:软件定义汽车 | |
信息安全/功能安全 |
| 其他宏观 | ||
| 车型平台 | 车企模块化平台 | |
| 政策、标准、准入 | 智能辅助驾驶法规和汽车出海 |
「AI与机器人月报」
「联系方式」
手机号同微信号
产业研究部丨赵先生 18702148304
推广传播部|杜先生 13910162318

