汽车跳槽机器人行业是降维打击,机器人硬件系统分析(上)
- 2026-03-12 12:20:47

目前机器人产品包括特斯拉,99%都是非工业化量产产品,“大部分还是‘手搓’”,“零部件也尚未达到车规或工业级要求”,“机器人产业要实现成本优化和规模化普及,可能需要大型企业,例如具备成熟工业化体系的车企,来推高机器人零部件及整体的量产能力。”
汽车行业demo级的产品就可以秒杀机器人行业量产级的产品,比如拆开机器人的运算系统,除了英特尔工控机的PCB板,其他芯片的PCB板都能看到飞线,使用普通家用网线接口,还有黑胶带缠绕,连消费级标准都达不到,离工业级差得很远,离汽车级差的更远,几乎不考虑安全,更不考虑Fullback系统,这是因为目前的机器人主要是按照设置好的程序或用遥控器表演,而非实际应用。
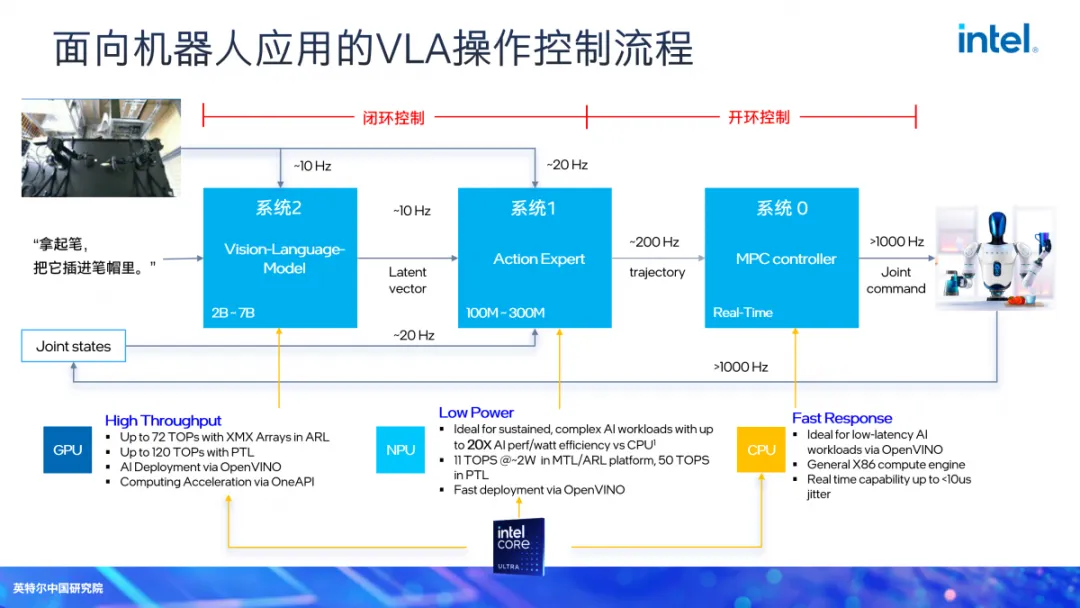
机器人的运算硬件系统可以分为三部分:一部分是大脑,即系统2,主要是英伟达的Orin系列,由于VLM/VLA基本已是机器人领域默认标准,而VLM/VLA参数主流是40-70亿,过于消耗资源(不是算力资源,是存储带宽资源),系统响应频率仅5-10Hz。因此分离出一个快速响应的动作专家即系统1,参数一般是13亿,系统响应频率可以达20Hz,还有一个部分是系统0,主要是英特尔芯片组以及通讯系统和电机驱动。系统0对CPU算力要求较高,完全不需要AI算力。
汽车行业对英伟达Orin非常熟稔,对英特尔芯片组比较陌生,不过这无所谓,机器人行业一般是直接用现成的英特尔工控板、NUC或mini PC,只需要考虑接口即可,完全不用考虑内部运行。通讯系统,自由度超过30的人形机器人一般都选择EtherCAT,且有引入TSN的趋势,和汽车领域的车载以太网重合度很高,不过机器人的节点数和带宽远低于车载领域,难度低了不少。电机驱动是新能源汽车工程师的专长,特别是目前高端的机器人和汽车领域一样也是采用FOC磁场定向控制即矢量控制,可以对无刷电机像素级控制。而传统电机控制领域还是老旧的方波控制,汽车硬件人跳槽到机器人行业,妥妥的降维打击。
目前机器人前五强,优必选、宇树、越疆、云深处和智元的高端产品100%采用英特尔的芯片组做小脑,英特尔在传统工业机器人的运动控制、高精度浮点计算和逆运动学求解等场景中,凭借高可靠性的工业控制板和丰富的视觉库,占据了绝对霸主位置,机器人的实时性和控制精度基本上由英特尔决定。国内机器人厂家,强项在大模型、AI相关领域,底层运控并非强项。做上层任务时,如何处理、分配、调度底层CPU核、内存、I/O等资源,在虚拟化隔离、内核绑定、操作系统穿透等方面,确保达成实时性目标,都由英特尔的CPU完成。
此外,机器人行业的双目立体视觉绝对霸主即RealSense,曾经是英特尔的子公司,后来独立,机器人行业几乎标配立体双目相机,通常只有两个选择,一个是Realsense的D435,另一个是RealSense的D455,二者差别主要是有效距离,即使配备激光雷达,RealSense的立体双目相机也大量使用,相机的像素毕竟比激光雷达的点云密度高得多。英特尔的工控机对RealSense的支持度也是最好的。
目前的机器人市场分成两大类,一类是包含具体应用的完整版,出厂后无需二次开发,另一类是只有基础应用,出厂后客户可以二次开发,后者目前是主流,因为目前机器人主要做科研和表演。因此需要两套英特尔CPU系统,一套是做基础应用的,一套是为客户二次开发用的。
主流机器人计算系统

表来源:网络
英特尔最新Panther Lake-H工控机连接图
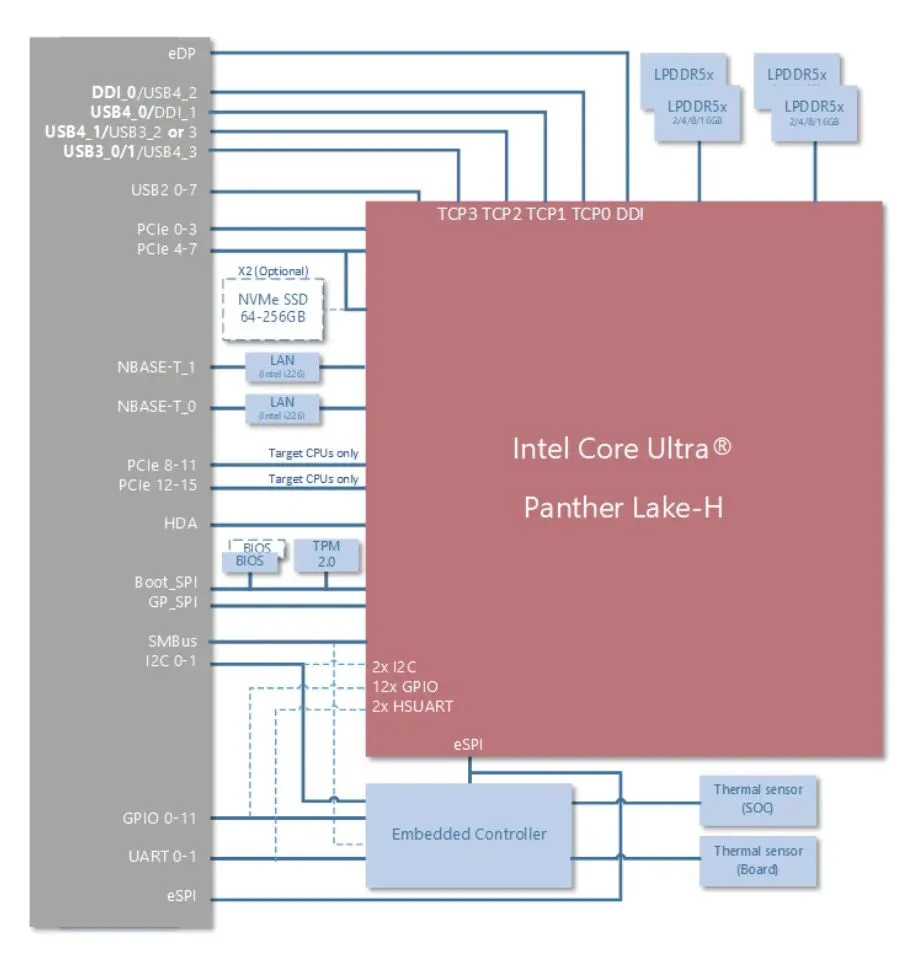
图片来源:英特尔
英特尔最新的Panther Lake-H总算力为稠密8位180TOPS,也就是稀疏360TOPS,远超英伟达Jetson Orin,完全可以不用外置独立GPU或加速器。CPU算力也是远超英伟达Jetson Orin。高通的IQ10系列稀疏算力达700TOPS,CPU算力比Panther Lake-H还高,也很适合做顶级人形机器人。
智元灵犀X1的电路架构
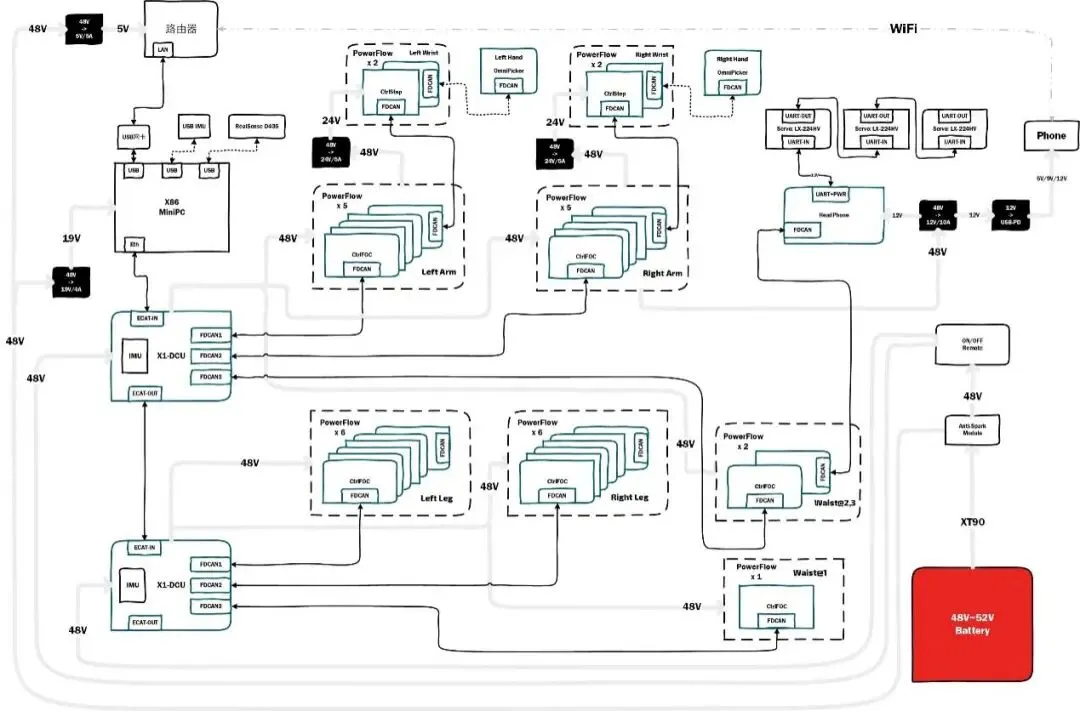
图片来源:智元机器人
灵犀X1全身执行器包含29个关节(R86-2*9、R86-3*6、R52*10、L28*4)和2个夹爪,支持扩展头部3自由度。执行器全部采用CAN-FD通讯。主控为X86 MiniPC,主控不具备CAN-FD接口,通过两个DCU模块扩展6路CAN-FD接口完成整机控制。
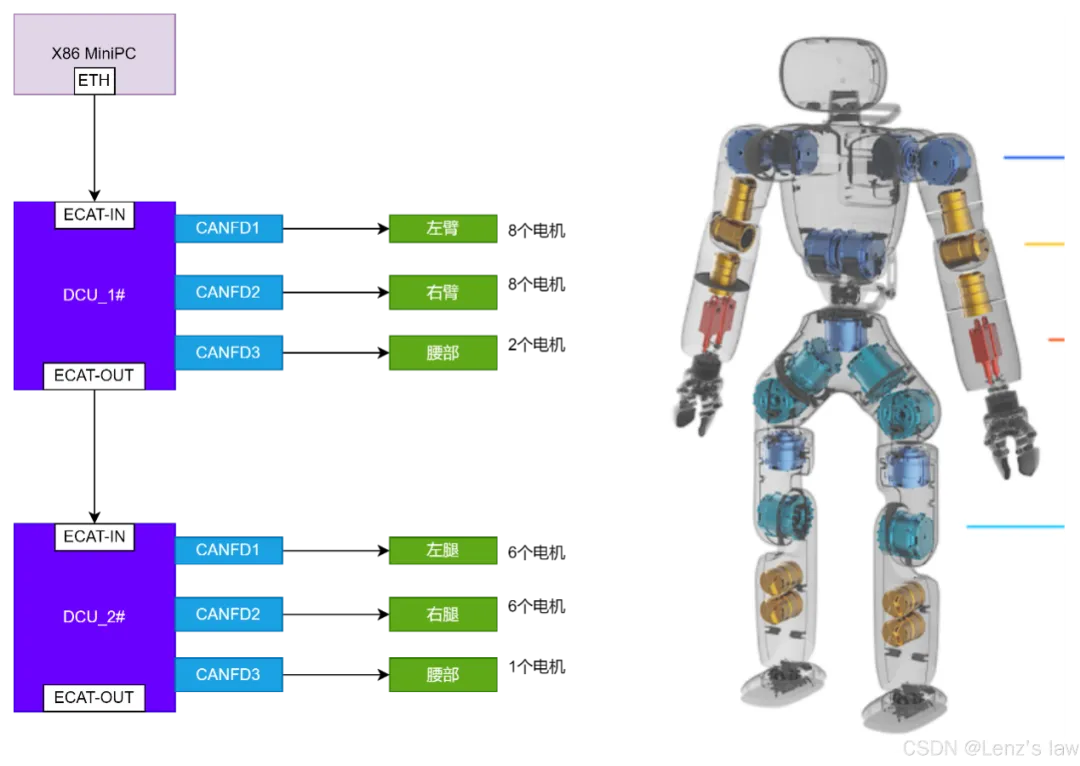
图片来源:智元机器人
这里面有两个DCU,即域控制器也有叫分布式控制单元,与汽车行业的域控制器很像,这个域控制器主要是连接英特尔的迷你PC和身体各关节的电机,每个DCU输出三路CAN-FD,如果要求实时性很高,那要升级为EtherCAT。
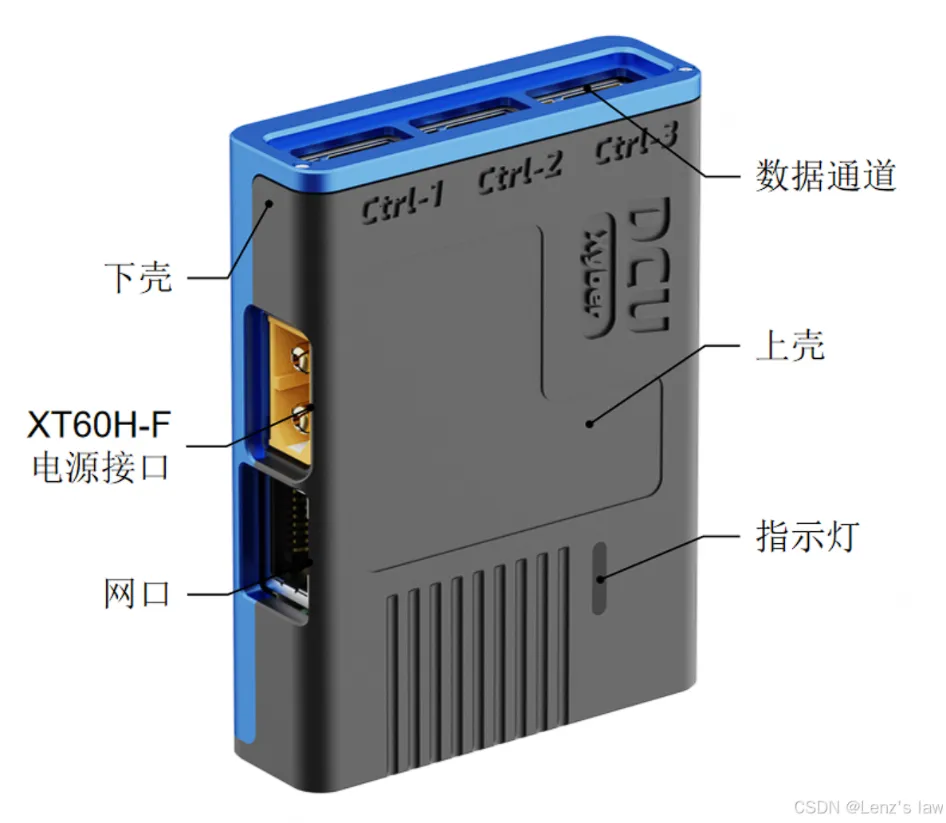
图片来源:智元机器人
DCU其实主要功能就是EtherCAT转3路CANFD。X86 MiniPC通过EtherCAT主站协议,封装CAN-FD数据帧成PDO进行传输,发送给DCU模块,DCU解析后拆分出三路CAN-FD的报文数据再转发给执行器。CAN-FD 通讯参数,仲裁域波特率 1M,采样点80%,数据域波特率5M,采样点75%。数据转发频率1KHz,可推测关键电机的控制频率为1KHz,电机采用CAN-FD 64字节打包控制协议,其中有广播模式,指的是用CAN-FD 64字节的长帧,包含8个电机的控制命令,一帧发出去同时控制8个电机。8个电机可同时收到控制命令,提升同步性CAN-FD只有数据域是采用5M高波特率,但是ID(仲裁段)还是用的1M,尽可能的利用CAN-FD的64字节长数据帧,可以减少仲裁段在通讯中的占比,最大化提升总线带宽利用,发挥CAN-FD加速的优势。当前已经有更好的CAN-FD多路扩展方案,有的6路CAN-FD扩展板,体积甚至可以做到4*5cm大小,远比灵犀X1的DCU小的多。
自己做一个DCU也不难,因为国产厂家先楫半导体的HPM5E00系列MCU非常适合DCU,HPM5E00 搭载德国倍福(Beckhoff)正式授权的EtherCAT IP,能够直接连接phy,不依赖市面上专有的从站芯片,且价格非常低廉。
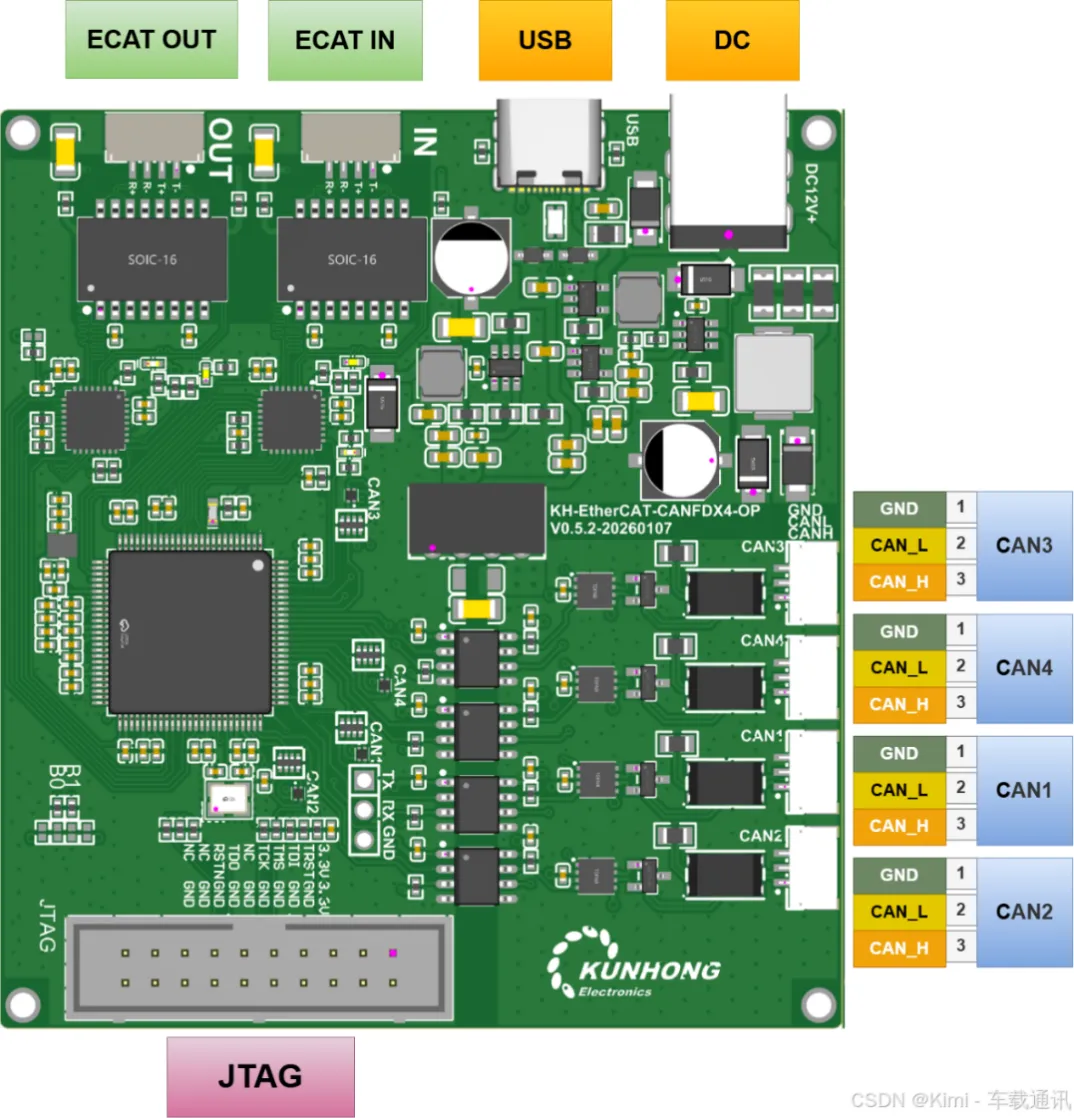
可以实现4路CAN-FD。
HPM5E00系列MCU简介
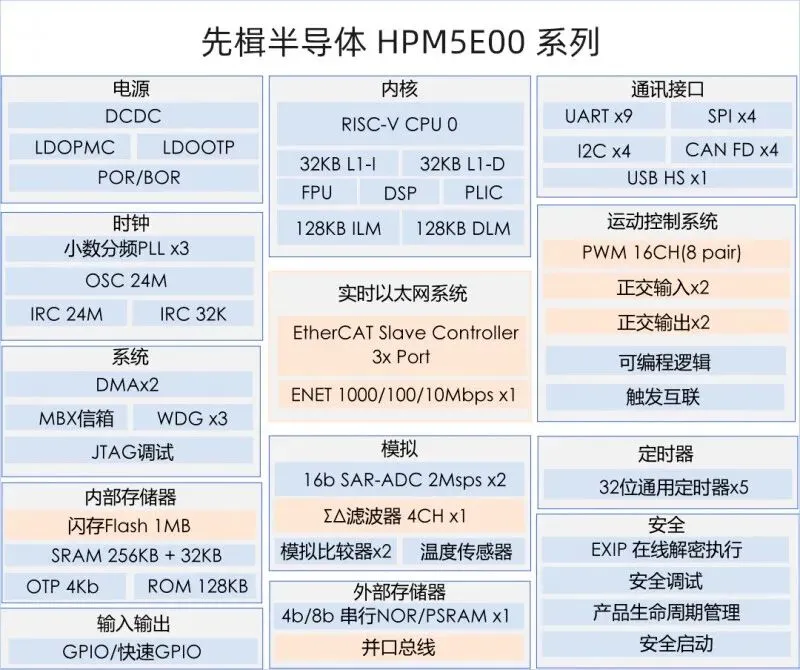
图片来源:先楫半导体
迷你PC连接立体双目相机RealSense D435和以太网以及IMU,迷你PC通过协议转换网关,将标准以太网转换为EtherCAT,配置为主节点或从节点。域控制器连接IMU,同时负责EtherCAT传输,域控制器输出三路CAN-FD,其中两路是手臂,初级是5个PowerFlow,然后次级是手腕的两个PowerFlow,还有一路初级是机器人腰部的两个PowerFlow,然后延伸到头部模块,再用串行总线连接三个高压舵机(型号LX-224HV)和一个麦克风阵列,UART接口,舵机应用在机器人颈部,用来控制机器人头部运转,三个舵机配合,实现头部左右摆动和俯仰的功能,串行总线舵机是通过串口指令的方式进行控制的,即控制板与舵机之间是使用数据的方式进行通信,通过指令包的发送和接收获取舵机当前的状态信息。另一路以太网近似,连接左右腿12个PowerFlow,还有一个腰部的PowerFlow。
PowerFlow是智元机器人自己开发的执行器模块,执行器包括三款,分别为 PowerFlow R86-3,PowerFlow R86-2,PowerFlow R52。它们通过高度集成一体化的设计,将减速器、电机、电机驱动器进行整合优化,各模块结构紧凑,便于安装拆卸。其中PowerFlow R86-3和R86-2 电机都采用了经典分数槽配合,选取最优的极槽配合,有效降低了齿槽转矩幅值和转矩波动,在绕组上,采用了集中式绕组,提高了槽满率和转矩密度。减速方式采用行星减速器,PowerFlow R86-3采用了三级减速比(48:1),而PowerFlow R86-2则采用了二级减速比(16:1)。PowerFlow R52减速方式也为行星减速器,采用了二级减速比(36:1)。R系列三款执行器都具有很高的承载能力和寿命;同时自研了高集成的驱动方案,双编码器反馈实现闭环控制,使其具备速度环、力矩环、位置环、MIT混合控制;不仅如此,还具备过流、过压欠压、超速、过温等多重保护机制,保证产品稳定可靠运行。
如果要将英伟达Orin做大脑,非常简单,用迷你PC的PCIe接口连接英伟达Orin即可,就像电脑接了一块显卡,如果要连两个英伟达Orin进一步增加AI算力,可以添加PCIe交换机,要求不高的话,以太网交换机也凑合能用。
下一篇我们详细谈谈人形机器人电机驱动MCU。
免责说明:本文观点和数据仅供参考,和实际情况可能存在偏差。本文不构成投资建议,文中所有观点、数据仅代表笔者立场,不具有任何指导、投资和决策意见。
更多佐思报告
| AI机器人 | ||
| AI机器人 | PBV及汽车机器人 | 无人配送车 |
| 移动充电机器人 | 飞行汽车 | |
| 触觉传感器研究 | ||
| AI BOX研究报告 | ||
| 其他宏观 | ||
| 车型平台 | 车企模块化平台 | 主机厂车型规划研究 |
| 出海 | 主机厂海外布局 | |
| 智能辅助驾驶出海研究 | ||
| 政策、标准、准入 | 智能辅助驾驶法规和汽车出海 | 自动驾驶标准与认证 |
| 其他 | 新技术应用趋势 | 24-25年新车及供应商趋势 |
「佐思研究月报」
新能源三电月报 | 汽车新技术月报 | 机器人月报 | AI技术月报
「联系方式」
手机号同微信号
产业研究部丨符先生 15810027571
赵先生 18702148304
数据服务部丨张女士 13716037793
战略咨询部丨韩女士 15810133447
推广传播部|廖女士 13718845418
杜先生 13910162318

