1.模型图例
2.两个规律(1)水平方向动量守恒系统在水平方向不受外力,因此水平方向动量守恒;竖直方向因受重力作用,动量不守恒。(2)系统机械能守恒忽略摩擦与空气阻力,小球与滑块组成的系统仅受重力作用,机械能守恒。
3.两个状态(1)当小球运动到最高点时,其竖直方向速度为零,与滑块在水平方向达到共速。此时系统动能最小,势能最大。(2)当小球再次回到最低点时,滑块速度最大,此过程类似于弹性碰撞,小球回到最低点时。
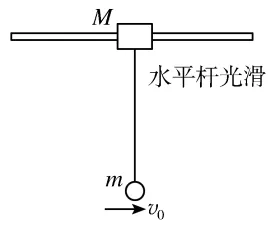
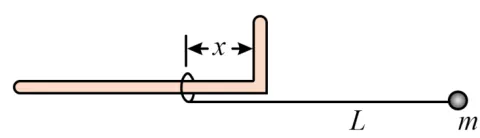
例题1[攻坚](多选)如图所示,一个固定的光滑导轨长臂水平、短臂竖直;一根不可伸长的轻绳,一端系在质量为的圆环上,另一端与质量为的小球相连,圆环套在长臂上。左手扶住圆环,右手拿起小球将细线水平拉直,已知细线长度,此时圆环距离短臂,现将圆环与小球同时由静止释放,小球向下摆动,环与短臂碰后粘连(碰撞时间极短)。在小球向下摆动过程中,小球与环沿绳方向速度始终相等,重力加速度为。从释放小球到小球第一次到达最低点的过程中,下列说法正确的是( )
A.小球与环组成的系统机械能不守恒B.小球与环组成的系统在水平方向上动量守恒C.环的最大速度大小为D.小球运动的最大速度大小为【答案】 AD【解析】小球与圆环释放瞬间,小球与圆环水平方向上不受外力,水平方向动量守恒,根据平均动量守恒有
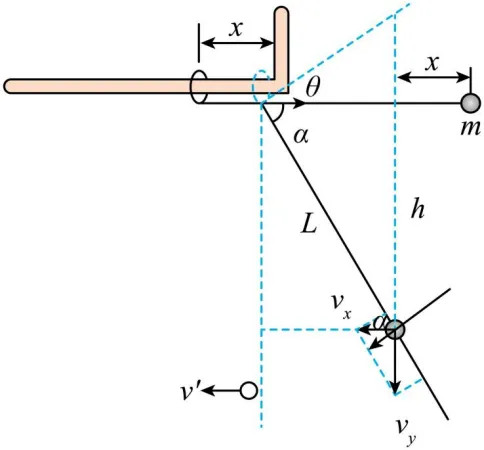
相等时间里小球与环水平位移相等,所以当环与短臂碰撞时,小球的水平位移也为,由于,所以当圆环与短臂碰撞时,小球未到最低点,之后环与短臂粘连,小球做圆周运动到最低点。
环与短臂粘连时,小球与环沿绳方向的速度减为 0 ,机械能不守恒,A正确;环与短臂粘连前系统水平方向动量守恒,粘连后水平方向动量不守恒, B 错误;
如图
环与断臂碰撞前瞬间速度最大,设最大速度为,绳与水平方向夹角为,根据
水平方向动量守恒,有可得小球的水平速度为根据机械能守恒定律,有在小球向下摆动过程中,小球与环沿绳方向速度始终相等,有可得联立解得,C 错误;小球运动到最低点时速度最大,设速度为,环与短臂粘连时,小球与环沿绳方向的速度减为 0 ,小球的速度为根据动能定理,有解得,D正确。故选 AD。
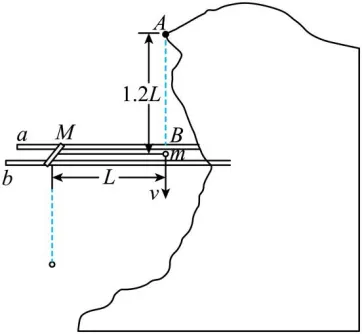
例题 6 [攻坚](2025•湖南卷•T15)某地为发展旅游经济,因地制宜利用山体举办了机器人杂技表演。表演中,需要将质量为的机器人抛至悬崖上的点,图为山体截面与表演装置示意图。为同一水平面上两条光滑平行轨道,轨道中有质量为的滑杆。滑杆用长度为的轻绳与机器人相连。初始时刻,轻绳绷紧且与轨道平行,机器人从点以初速度v竖直向下运动,点位于轨道平面上,且在点正下方,。滑杆始终与轨道垂直,机器人可视为质点且始终作同一坚直平面内运动,不计空气阻力,轻绳不可伸长,,重力加速度大小为。
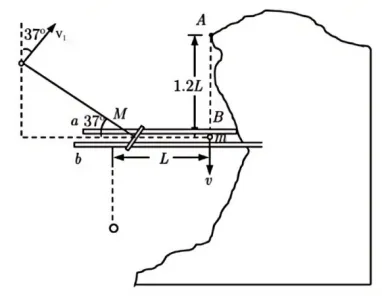
(1)若滑杆固定,,当机器人运动到滑杆正下方时,求轻绳拉力的大小; (2)若滑杆固定,当机器人运动到滑杆左上方且轻绳与水平方向夹角为时,机器人松开轻绳后被抛至点,求的大小;(3)若滑杆能沿轨道自由滑动,,且,当机器人运动到滑杆左上方且轻绳与水平方向夹角为时,机器人松开轻绳后被抛至点,求与的关系式及的最小值。【答案】【解析】(1)设机器人运动至最低点时速度为,从到最低点高度下降,由动能定理:
代入,得:
在最低点,绳拉力与重力合力提供向心力:
(2)设绳与水平方向夹角时机器人速度为,由能量守恒:
运动分解:水平位移:坚直位移:代人解得再得,最终:
(3)设机器人运动至绳与水平时,机器人对地速度水平、竖直分量为,滑杆速度为(水平向左为正)。
系统水平动量守恒:
能量守恒:
代入:
机器人相对滑杆做圆周运动,相对速度沿绳垂直方向,因此相对速度的水平分量与坚直分量满足:
(因为滑杆向左,机器人相对滑杆水平向右,坚直向上)
由和上式解得:
代入能量方程并化简可得:
当时取最小值: